近日,国家香蕉产业技术体系果园生产机械化岗位团队在农林科学领域国际顶级期刊《Computers and Electronics in Agriculture》(中科院一区TOP期刊,影响因子8.9)发表题为“UAV-prior-guided UGV path planning in ground-constrained orchards: a case study in banana plantations”的研究论文。该研究针对蕉园复杂地形下机械作业路径规划难、成本高等痛点,创新提出了基于无人机“结构引导式”路径规划框架,为地面无人平台生成全园覆盖作业路径,显著提升了复杂地形下的路径生成效率与可执行性。
图 1 论文刊登
蕉园中普遍存在的沟渠、坑洼及垄埂等地面约束,导致可通行区域碎片化,传统路径规划方法计算代价高、路径连续性差。研究团队设计了多任务感知网络YOLO-DS-poSeg,同步实现香蕉植株中心点检测与地面要素(沟渠、道路等)分割;进而采用方向感知聚类与凸包交集策略提取行走路径骨架,突破了传统栅格骨架化方法计算代价高昂的局限,预处理效率提升3–4个数量级。同时,融合差速底盘运动学约束与L-BFGS-B优化算法,实现了转弯段轨迹的曲率约束平滑,最大曲率降低84.8%,显著提升了复杂果园环境下作业路径的连续性与可执行性。

图 2 工作流程
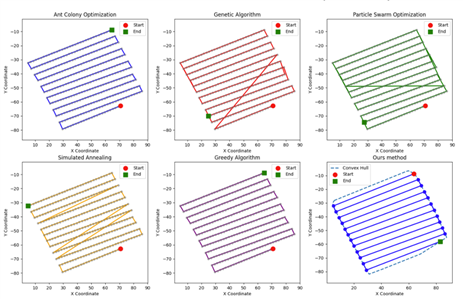
图 3 不同算法下全局野外路径规划结果对比
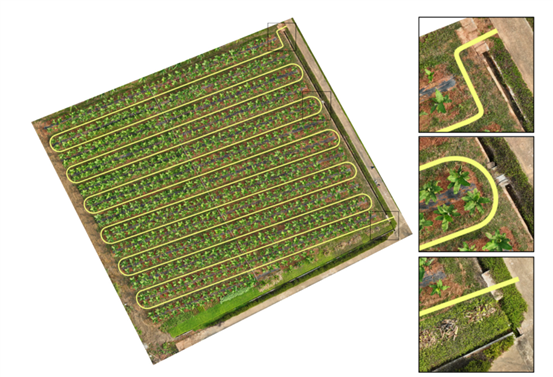
图 4 考虑地头避沟转向及进出通道约束的全局蕉园路径规划结果
该研究成果可直接服务于香蕉园的无人化精准对靶喷施、变量施肥等作业,还可推广至芒果等其他热带果树及高秆作物的智慧化管理,助力果园生产从“机械化”向“无人化、智能化”转型升级。果园生产机械化岗位徐兴副教授为论文第一作者,段洁利教授为通讯作者;硕士研究生梁华子墨,以及杨洲教授、付函副教授和金莫辉博士共同参与研究。该工作得到国家现代农业产业技术体系建设专项(CARS-31)等多个项目的资助。
文章链接:https://www.sciencedirect.com/science/article/pii/S016816992600373X
内容编辑:
 地址:海南省海口市城西学院路4号(571101)
地址:海南省海口市城西学院路4号(571101) 电话:0898-66986419 传真:0898-66986419
电话:0898-66986419 传真:0898-66986419  E-mail:china_banana2008@vip.163.com
E-mail:china_banana2008@vip.163.com