近日,国家香蕉(芒果)产业技术体系果园生产机械化岗位团队在期刊 Computers and Electronics in Agriculture 发表了题为 “Stereo visual-inertial localization algorithm for orchard robots based on point-line features” 的研究论文。
随着农业机器人技术的快速发展,果园机器人已成为机器人领域的研究热点,并在果园生产中展现出广泛的应用前景。然而,果园环境的复杂性和缺乏纹理特征给机器人定位带来了挑战。传统的视觉惯性里程计 (VIO) 算法主要依赖于特征点,在果园环境中,由于树叶的遮挡和纹理缺失,导致特征点匹配不稳定,定位精度常常受到影响,如图1(a)。相比之下,线特征方法表现出更优异的检测效果,如图1(b)。
本研究针对果园环境的特点,提出了一种点-线特征融合的三维视觉-惯性定位算法。该算法在 VINS-Fusion 特征点视觉定位算法的基础上,引入了线特征检测算法 (LSD),提出线段长度过滤和特征匹配过滤策略,提高了线特征匹配质量。此外,该算法还优化了关键帧选择标准,减少了纹理缺失区域的冗余关键帧,并将线特征信息加入后端优化,进一步提高了定位精度。在Rosario、EuRoC公开数据集(图2)和自建的香蕉园(图3)、芒果园和黄皮果园数据集上进行实验,结果表明该算法比 VINS-Fusion 具有更高的定位精度,并能够在 10Hz 的频率下实现实时定位。该算法为果园机器人自主导航提供了可行的解决方案,有助于推动果园智能化和自动化的发展。
徐兴副教授为本文第一作者和通讯作者,硕士研究生梁锦名为第二作者。本研究获得国家现代农业产业技术体系资助 (CARS31-11) 和广州市重点研发计划(2024B03J1355) 的资助。
文章链接:https://doi.org/10.1016/j.compag.2024.109202
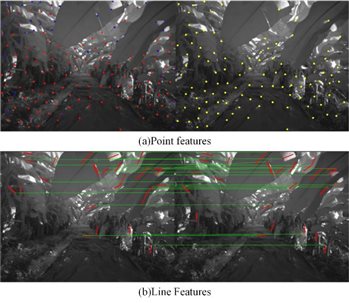
图1 点特征和线特征检测比较

图2 EuRoC定位轨迹热图
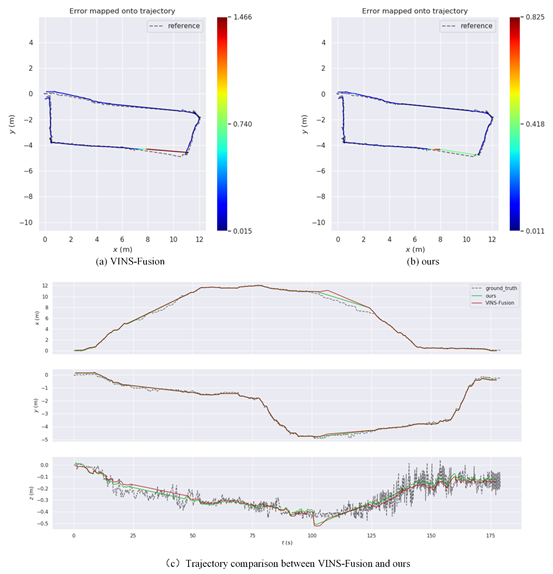
图3 香蕉园热图和轨迹对比
内容编辑:
 地址:海南省海口市城西学院路4号(571101)
地址:海南省海口市城西学院路4号(571101) 电话:0898-66986419 传真:0898-66986419
电话:0898-66986419 传真:0898-66986419  E-mail:china_banana2008@vip.163.com
E-mail:china_banana2008@vip.163.com